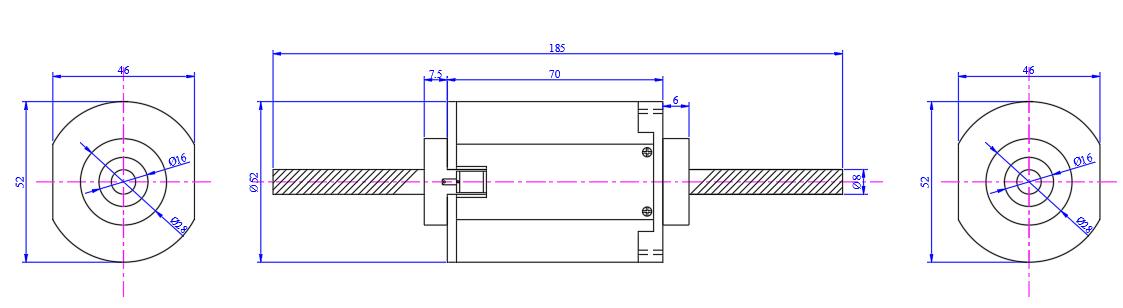
Tarkkuusservo DC-moottori 46S/185-8A

Servo-DC-moottorin perusominaisuudet: (muut mallit, suorituskykyä voidaan mukauttaa)
| 1. Nimellisjännite: | DC 7,4V | 5. Nimellisnopeus: | ≥ 2600 rpm |
| 2. Käyttöjännitealue: | DC 7,4V-13V | 6. Estovirta: | ≤2,5A |
| 3. Nimellisteho: | 25W | 7. Kuormavirta: | ≥1A |
| 4. Pyörimissuunta: | CW-lähtöakseli on yläpuolella | 8. Akselin välys: | ≤1,0 mm |
Tuotteen ulkonäkökaavio
Vanhenemisaika
Valmistuspäivästä lähtien tuotteen turvallinen käyttöaika on 10 vuotta ja jatkuva käyttöaika ≥ 2000 tuntia.
Tuotteen ominaisuudet
1. Kompakti, tilaa säästävä muotoilu;
2.Kuulalaakerirakenne;
3. Harjan pitkä käyttöikä;
4. Ulkoinen pääsy harjoihin mahdollistaa helpon vaihtamisen moottorin käyttöiän pidentämiseksi;
5.Suuri käynnistysmomentti;
6.Dynaaminen jarrutus nopeampaan pysähtymiseen;
7.Kääntyvä kierto;
8. Yksinkertainen kaksijohdinliitäntä;
9. F-luokan eristys, korkean lämpötilan hitsauskommutaattori.
10. Korkea suorituskyky, korkea kustannustehokkuus ja vähäiset häiriöt.
Sovellukset
Sitä käytetään laajasti älykodin, tarkkuuslääketieteellisten laitteiden, autokäyttöisten, kulutuselektroniikkatuotteiden, hieronta- ja terveydenhuoltolaitteiden, henkilökohtaisen hygienian työkalujen, älykkään robottivaihteiston, teollisuusautomaation, automaattisten mekaanisten laitteiden, digitaalisten tuotteiden jne.
Kuvaus suorituskyvystä



Servojärjestelmä: Se on automaattinen ohjausjärjestelmä, jonka avulla lähtöohjatut suureet, kuten kohteen sijainti, suunta ja tila, voivat seurata syötekohteen (tai tietyn arvon) muutoksia. Servon päätehtävänä on vahvistaa, muuntaa ja säätää tehoa ohjauskomennon vaatimusten mukaisesti siten, että käyttölaitteen vääntömomenttia, nopeutta ja asentoa voidaan ohjata erittäin joustavasti ja kätevästi.
"Servo"-suorituskykynsä vuoksi sitä kutsutaan servomoottoriksi. Sen tehtävänä on muuntaa tulojännitteen ohjaussignaali ulostulon kulmasiirtymäksi ja kulmanopeudeksi akselilla ohjausobjektin ohjaamiseksi.
DC-servomoottorin periaate
DC-servomoottorin toimintaperiaate on periaatteessa sama kuin tavallisen tasavirtamoottorin. Sähkömagneettinen vääntömomentti syntyy ankkurin ilmavirran ja ilmavälin magneettivuon vaikutuksesta, jotta servomoottori pyörii. Yleensä ankkurisäätömenetelmää käytetään muuttamaan nopeutta muuttamalla jännitettä pitäen samalla viritysjännite vakiona. Mitä pienempi jännite, sitä pienempi nopeus, ja kun jännite on nolla, se lakkaa pyörimästä. Koska kun jännite on nolla, virta on myös nolla, joten moottori ei synnytä sähkömagneettista vääntömomenttia, eikä se näytä itsekiertoilmiöltä.







